Indian Journal of Science and Technology
DOI: 10.17485/ijst/2017/v10i18/111320
Year: 2017, Volume: 10, Issue: 18, Pages: 1-13
Original Article
Rajneesh Kumar Rai1* and Sunil Punjabi2
1Department of Mechanical Engineering, Sri Dadaji Institute of Technology and Science, Khandwa - 450001, Madhya Pradesh, India; [email protected] 2Department of Mechanical Engineering, Ujjain Engineering College, Ujjain - 456010, Madhya Pradesh, India; [email protected]
*Author for the correspondence:
Rajneesh Kumar Rai
Department of Mechanical Engineering, Sri Dadaji Institute of Technology and Science, Khandwa - 450001, Madhya Pradesh, India; [email protected]
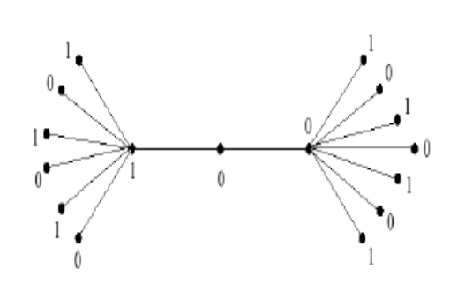
Objectives: To detect structural similarity i.e. isomorphism between the kinematic chains and the number of inversions i.e. distinct mechanisms possessed by a kinematic chain. Methods/Statistical Analysis: A shortest distance matrix and the corresponding relative shortest distance matrix are generated in a completely different manner. Thereafter a relative shortest distance string for each link is obtained whose similarity indicates number of inversions i.e. distinct mechanisms in a kinematic chain. Then relative shortest distance link value and the corresponding relative shortest distance chain value are obtained whose similarity indicates isomorphism between kinematic chains. Findings: The proposed method is applied to a family of 40 kinematic chains with 9 links and 2 degree of freedom. Relative shortest distance string table reveals that the total numbers of inversions i.e. distinct mechanisms are 254 and relative shortest distance chain value table indicates that all the chains of the family are not isomorphic. Many other methods have been applied, for the same family, in the past by many other researchers of repute and the results obtained by present method are in full consensus with the results of the previous researchers. The proposed method provides two unique structural invariants i.e. shortest distance string and relative shortest distance chain value as strongest and simplest tools for detection of isomorphism and number of inversions of kinematic chains. Application/Improvements: Like many other methods applied by our parent researchers, with due respect, the proposed method does not involve long and complicated calculations, therefore it is easy, efficient and reliable.
Keywords: Elusive Method, Isomorphism, Inversion, Kinematic Chains, Mechanisms
Subscribe now for latest articles and news.