Indian Journal of Science and Technology
DOI: 10.17485/IJST/v15i40.1672
Year: 2022, Volume: 15, Issue: 40, Pages: 2056-2065
Original Article
Ramachandra A C 1, V Viswanatha2*, H Suhas3, K Kishor3
1Professor and Head, Electronics and Communication Engineering Department, Nitte Meenakshi Institute of Technology, India
2Asst.Professor, Electronics and Communication Engineering Department, Nitte Meenakshi Institute of Technology, Bangalore, India
3M.Tech. Student, Electronics and Communication Engineering Department, Nitte Meenakshi Institute of Technology, India
*Corresponding Author
Email: [email protected]
Received Date:13 August 2022, Accepted Date:16 September 2022, Published Date:18 October 2022
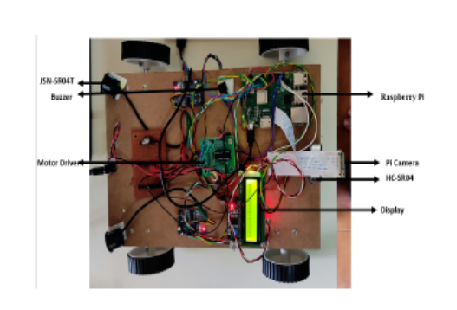
Objectives : Hardware implementation of advanced driving assistance system which can be able to identify i). Lane detection and assist system. ii). Blind spot detection and warning system (BSDW). iii). Forward collision and warning system (FCWS). iv). Pedestrian detection system. The primary goal of the developed system is to identify the above features in order to prevent accidents on the road and ensure pedestrian safety. The suggested method uses a canny edges detectiMethods:on algorithm is used to detect road edges. The input to this system is images captured by the camera with the help of the Open CV library a python image processing algorithm is created that tracks the lane. Histogram of Orientation (HOG) using the sliding window method is used for pedestrian detection. The control unit for the proposed system is Raspberry Pi module 3B, JSN-SR04T ultrasonic sensor and HC-SR04 ultrasonic sensor has been used for (BSDW) system and (FCWS) respectively. Findings: Results demonstrate that the suggested technique can accurately recognize both straight and curved lanes using edge detection algorithm, and also able to identify vehicles in Blind spot area. Novelty: This technology has a high demand in the automotive industry and the system can be implemented in all the future cars which can able to reduce the accident rates.
Keywords: Adaptive Cruse Control; Blind Spot Detection; Autonomous Driving Assistance system; Lane Detection System; Forward Collision; Pedestrian detection; OpenCV
© 2022 et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited. Published By Indian Society for Education and Environment (iSee)
Subscribe now for latest articles and news.