Indian Journal of Science and Technology
Year: 2023, Volume: 16, Issue: 26, Pages: 1947-1957
Original Article
Jaydeepsinh C Baria1*, Kuldip Patel2, Darshankumar C Dalwadi3, C Dalwadi3
1Ph.D Research scholar, Gujarat Technological University, India
2BVM Engineering College, V. V. Nagar, Anand, India
3Associate Professor, BVM Engineering College, Anand, India
*Corresponding Author
Email: [email protected]
Received Date:06 April 2023, Accepted Date:15 June 2023, Published Date:04 July 2023
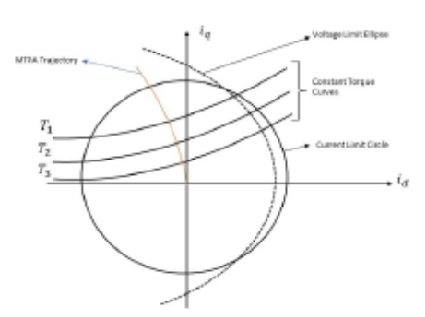
Objectives: This paper simulates a high-performance PI and FLC-based controller for an IPMSM drive in which the speed should closely follow the reference speed and voltage-current trajectory with different conditions like load disturbance, variation in circuit parameters, and control strategy. In FOC, the PI and fuzzy controller are used for sliding mode control. This controller generates the d-axis current (Id) and q-axis current (Iq), which control the torque and magnetic field vector for each stator winding, so the speed of the motor can be effectively controlled. Methods: In this paper, we used two loops: one is the outer speed loop, and another is the inner loop called the current loop, which generates the pulses for the inverter. The optimal behavior of the controllers is designed based on the Maximum Torque per Ampere (MTPA) method for stand-still to base speed operation and the Field Weakening (FW) method for the above base speed operation. The mathematical model of the IPMSM motor can be derived from its dynamic d-q model. This proposed drive system is simulated in MATLAB-Simulink software with different conditions like speeds and loads. Moreover, the fixed-gain PI controller is mostly affected by the step change in reference speed, circuit parameters, and load condition. The accurate speed control of the drive becomes a complex issue due to the non-linear coupling between the stator current and rotor and the nonlinearity in the torque. Therefore, the fuzzy controller is more popular in highperformance IPMSM drives. Novelty: In this paper, the FLC is used as a speed controller, and the proposed control scheme reduces the computation for real-time implementation. The hysteresis current controllers are used, and outputs are given to logic, which is used to switch ON and OFF the inverter. The robustness of the FLC-based drive is verified by theoretical and simulation results. In this paper, the three inputs to the FLC are: is the change in rotor speed, wr is rotor speed, and Δe is the change in speed error. Fuzzy rules are developed by different membership functions used to obtain the optimized value (Id * and Iq*), which gives precise speed control under different operatingconditions over a wide speed range.
Keywords: Interior Permanent Magnet Synchronous Motor (IPMSM); Fuzzy Logic Controller (FLC); proportionalintegral (PI) Maximum Torque per Ampere (MTPA); Field Weakening (FW); Vector Control; fieldoriented control (FOC); Hysteresis Current Controller
© 2023 Baria et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited. Published By Indian Society for Education and Environment (iSee)
Subscribe now for latest articles and news.